Precyzyjny układ naciągu
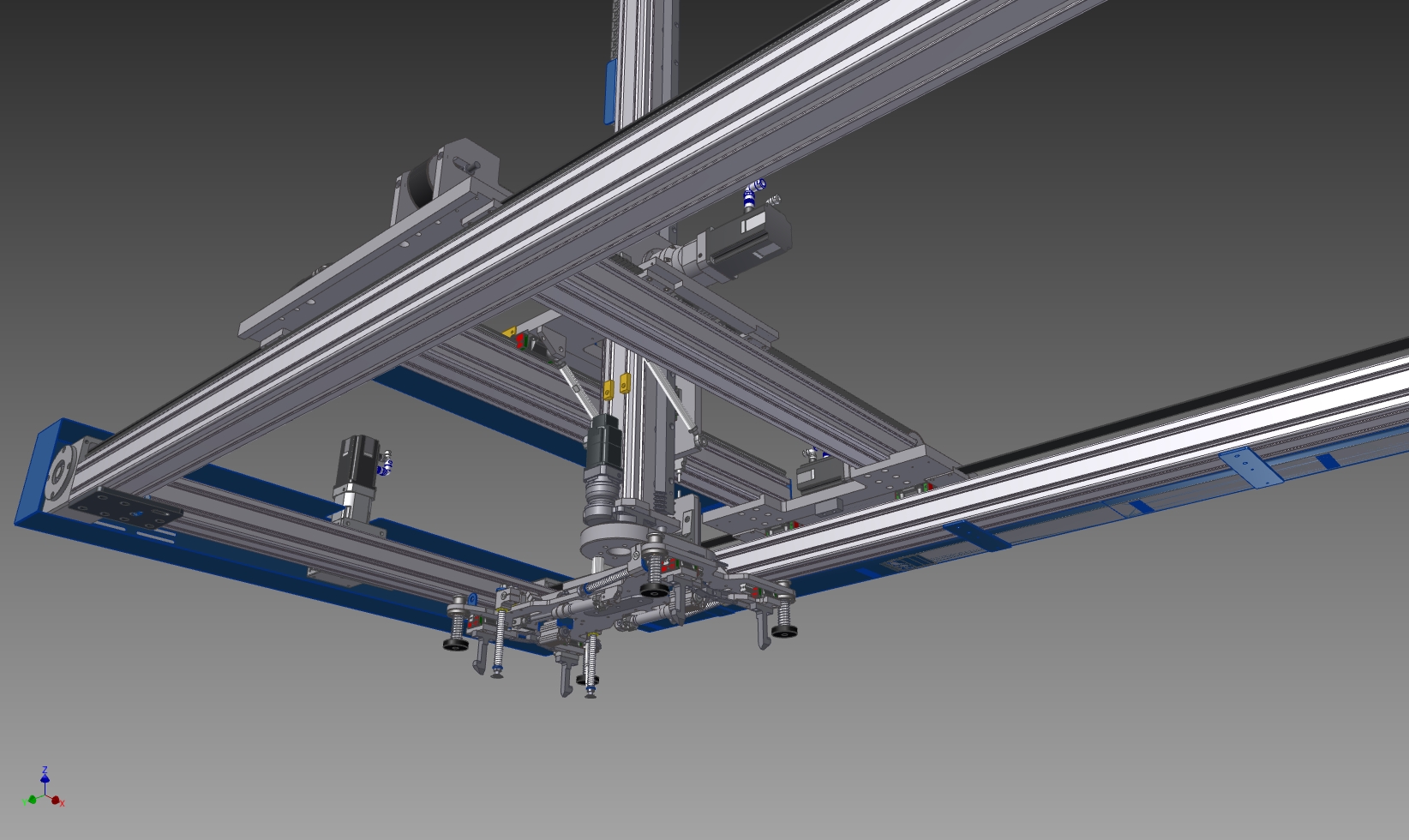
Trójosiowy manipulator obrotowy
Zadanie:
Projekt obejmował dobór układów napędowych manipulatora trójosiowego z niezależnym, obrotowym chwytakiem. Głównym wymaganiem było spełnienie wysokich parametrów pracy poszczególnych osi robota, takich jak: duża ilość cykli, dynamika ruchu oraz powtarzalność ruchów.
Rozwiązanie:
Ze względu na wymagające własności kinematyczne i dynamiczne systemu, szczegółowo określone przez klienta, wykonano niezbędne obliczenia inżynierskie i zastosowano wysokiej klasy podzespoły mechaniczne, czyli precyzyjne przekładnie planetarne firmy Liming z serii Serwobox oraz dokładne listwy i koła zębate firmy Atlanta.