+48 32 414 91 53
+48 32 414 91 53 info@pivexin-tech.pl
info@pivexin-tech.pl
Porównanie typów napędów elektrycznych – charakterystyki
Czy wiesz, że..
Każdy z dostępnych napędów na rynku posiada swoją własną charakterystkę pracy?
Zależność charakterystyki momentu, jaka cechuje dany silnik, jest uwarunkowana samym typem tego silnika i technologią jego wykonania.
Jakiś czas opisywaliśmy już ogólną zalezność napędów od ich możliwości oraz budżetu.
Zanim podejmiemy jednak decyzję o wyborze napędu, ważnym jest, by zapoznać się z rzeczywistą charakterystyką jego momentu obrotowego dla danych prędkości.
Biorąc pod uwagę aspekty sterowania danej osi oraz przy błędnym doborze typu napędu, możemy spoktać się z kilkoma problemami, takimi jak:
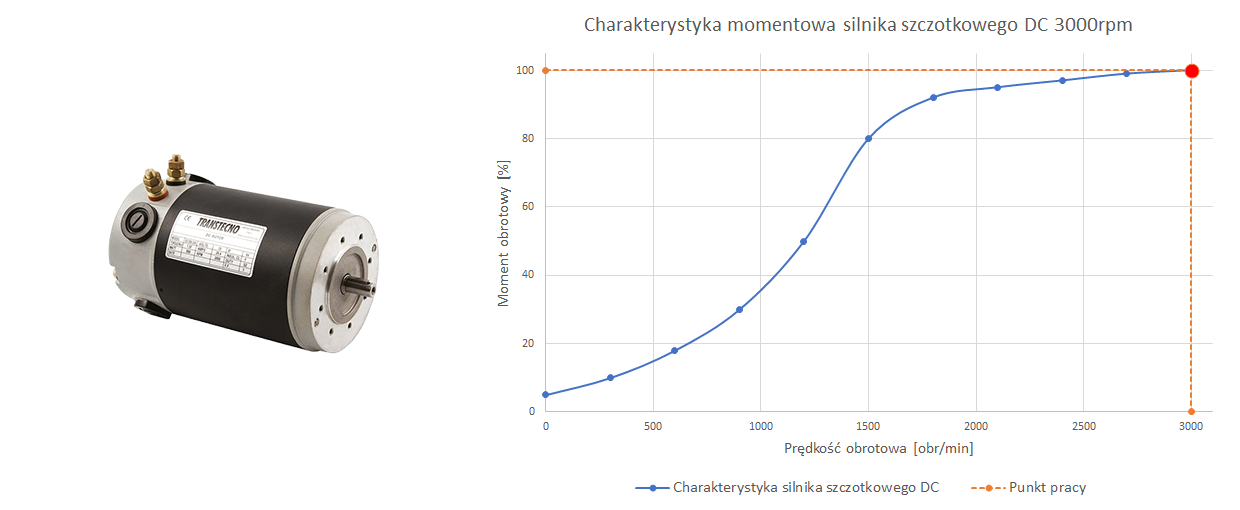
– problemy przy sterowaniu oraz podwyższony poziom hałasu dla niskich predkości obrotowych silnika DC szczotkowego,
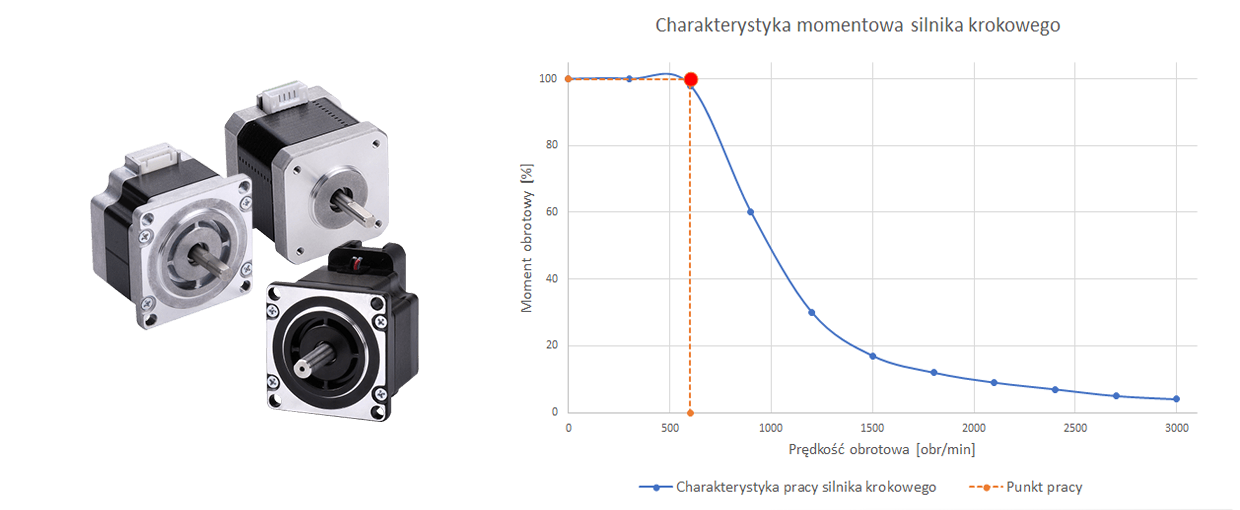
– problemy przy sterowaniu oraz gubienie kroków w przypadku silników krokowych dla wysokich prędkości obrotowych,
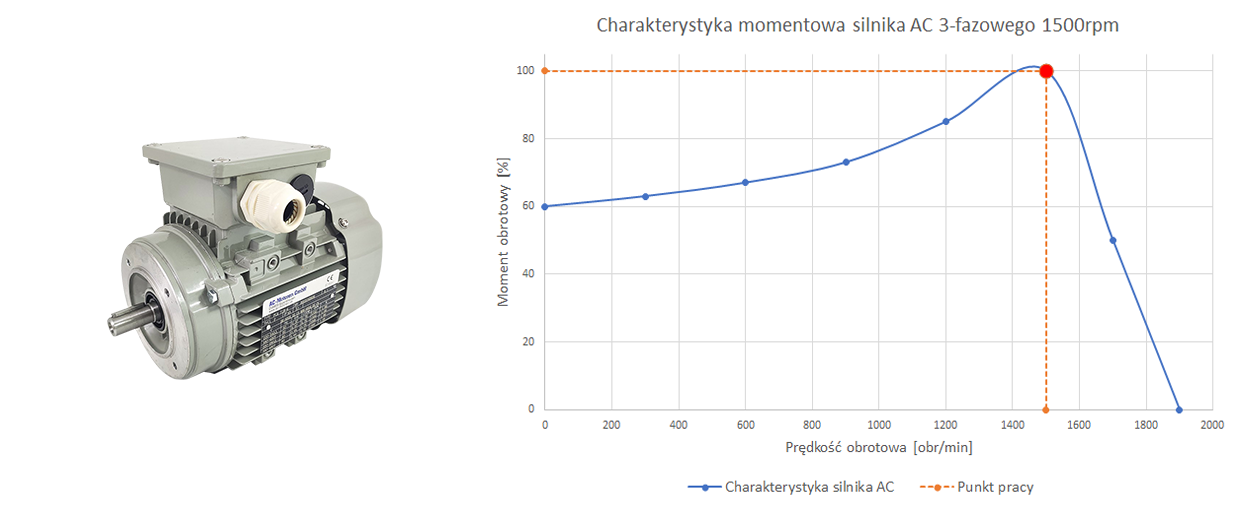
– zbyt niski moment rozruchowy dla silników AC (przy sterowaniu bez falownika),
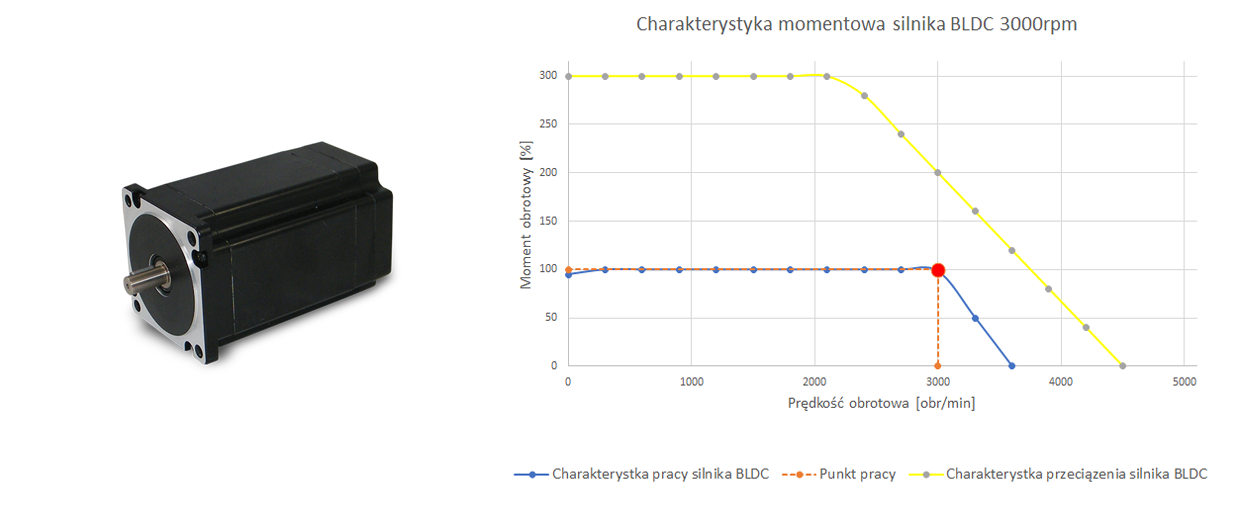
– praca skokowa przy prędkościach bliskich zeru dla silnika BLDC (niska rozdzielczość sprzężenia zwrotnego – czujniki Halla),
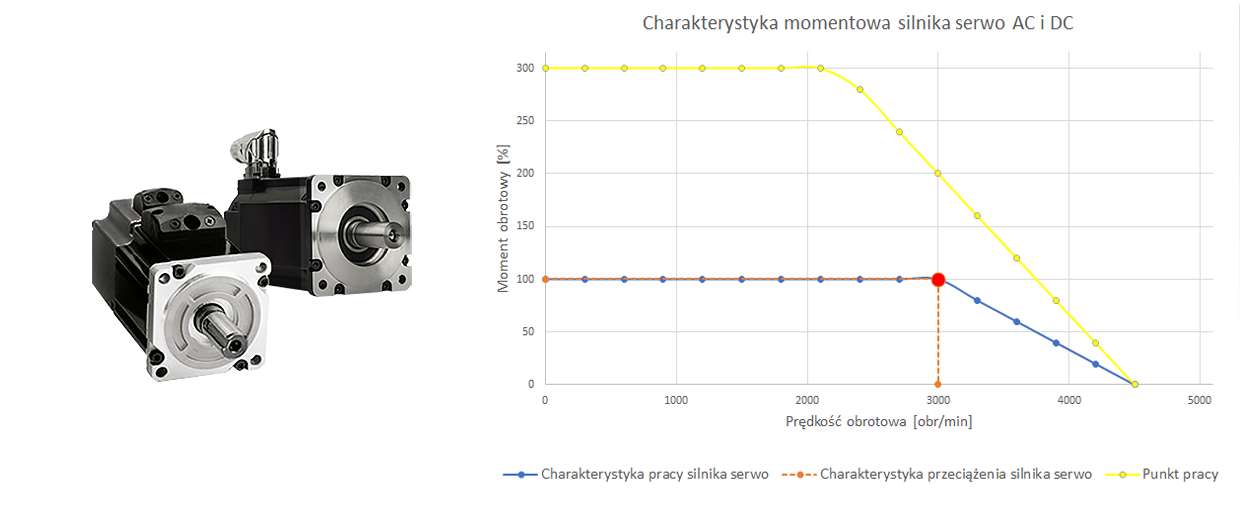
– zbyt wolna odpowiedź układu oraz oscylacje dla silników serwo z enkoderem o zbyt niskiej rozdzielczości,
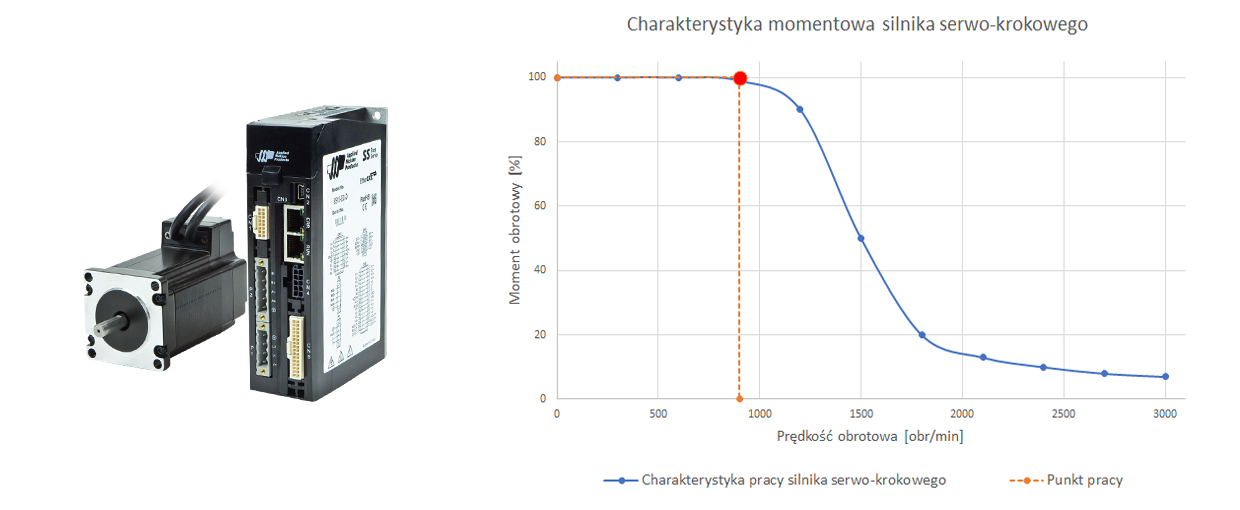
– błędy przeciążenia na sterowniku dla sterowania wyższymi prędkościami obrotowymi silników serwo-krokowych.
Biorąc pod uwagę wyżej wymienione problemy oraz zapoznając się z teoretycznymi charakterystkami silników, można w bardzo szybki sposób dokonać wyboru typu napędu, jaki będzie odpowiedni dla naszej aplikacji.
Pozwoli to na wyeliminowanie już na początku pracy możliwych problemów z napędem.
Wciąż się wahasz, jaka technologia będzie dla Ciebie odpowiednia? Zgłoś się do zespołu Pivexin Technology Sp. z o. o.
– grupa doświadczonych inżynierów rozwieje Twoje wątpliwości oraz zasugeruje rozwiązanie problemu powstałego przy doborze napędu!