Projekte
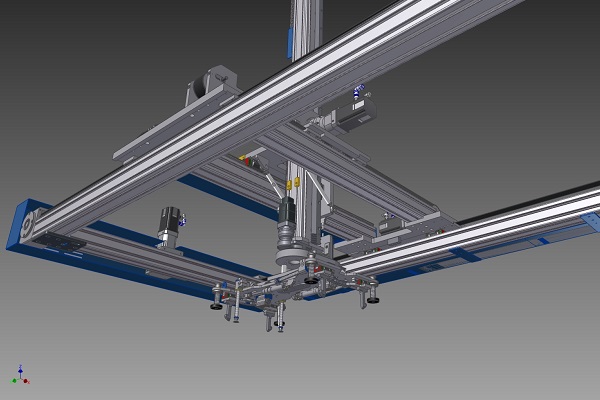
Dreiachsiger Rotationsmanipulator
Das Projekt umfasste die Auswahl von Antriebssystemen für einen dreiachsigen Manipulator mit einem unabhängigen Drehgreifer. Die Hauptanforderung bestand darin, die hohen Leistungen der einzelnen Roboterachsen zu erfüllen, wie z. B. eine hohe Zyklenzahl [...]
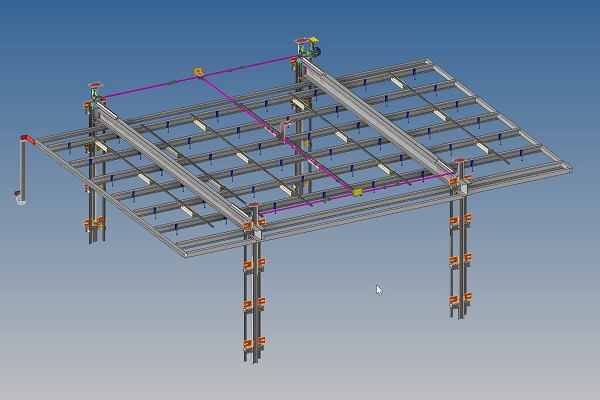
Sonnenkollektoren
Ein Windkanal-Forschungsunternehmen benötigte eine Antriebslösung für zwei Projekte: ein System zum Drehen der Schubplatten und einen unabhängigen Mechanismus zum Anheben der Gitterkonstruktion [...]

System zum automatischen Abwickeln und Längs- und Querschneiden von Rohstoffen
Ein Unternehmen, das Ausrüstungen für die Nähindustrie herstellt und liefert, benötigte lineare Führungssysteme für seine neu [...]
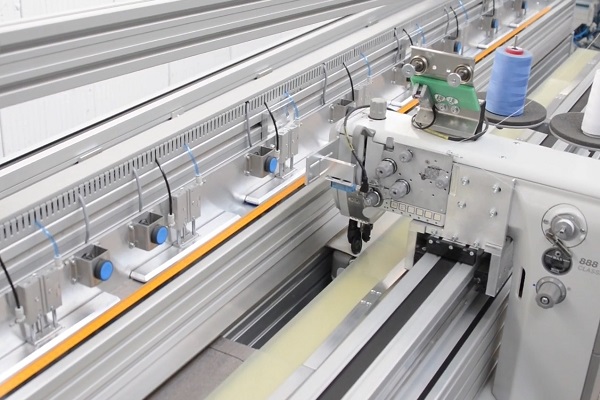
Automatisches System zum Nähen von Tunneln in Raffrollos
Ein Unternehmen, das Ausrüstungen für die Nähindustrie herstellt und liefert, benötigte lineare Bewegungssysteme für seine neu hergestellte Maschine, mit der Tunnel in Raffrollos genäht werden sollten. Die Verschiebesysteme mussten dafür sorgen, dass alle beweglichen [...]
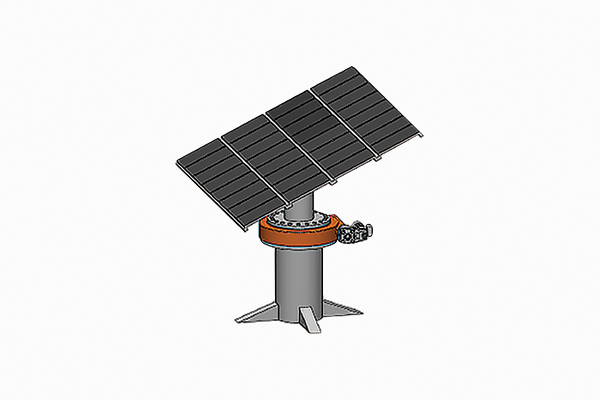
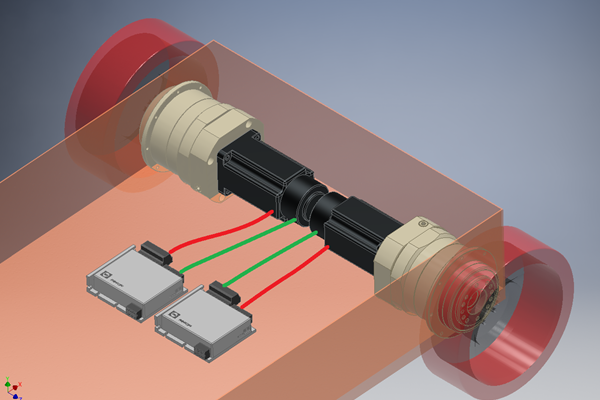
Solartracker - Drehscheiben für Photovoltaikanlagen
Die Aufgabe bestand darin, einen energieoptimierten Antrieb zu wählen, der den Kern des Solarnachführsystems in Bewegung setzt. Das Problem war neben den reinen Anforderungen an hohes Drehmoment und niedrige Geschwindigkeit die sehr hohe [...]

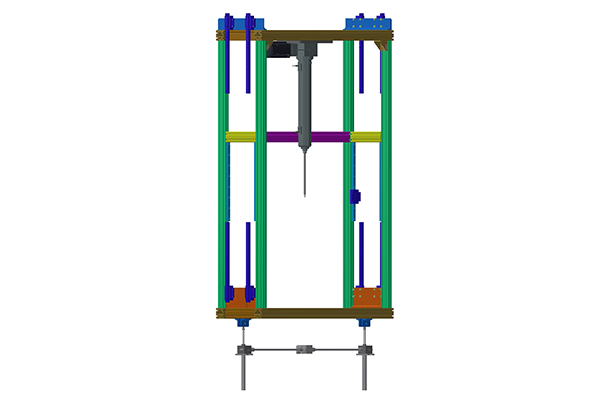
Präzises Spannsystem
Das Projekt umfasste die Auswahl von Antriebssystemen für einen dreiachsigen Manipulator mit einem unabhängigen Drehgreifer. Die Hauptanforderung bestand darin, die hohen Leistungen der einzelnen Roboterachsen zu erfüllen, wie z. B. eine hohe Zyklenzahl, Bewegungsdynamik und Wiederholbarkeit der Bewegungen[...]
Heben eines Schweißroboters
Ein Unternehmen, das dickwandige Walzen herstellt, benötigte ein System zum Heben eines Schweißroboters mit einem 2 Meter langen Schweißarm. Das System musste aufgrund der unterschiedlichen Durchmesser der zu schweißenden Rollen stufenlos in der Höhe verstellbar sein.
[...]
Aufgehängte Schweißroboterbahn
Ein Unternehmen, das dickwandige Walzen herstellt, benötigte ein System zum Heben eines Schweißroboters mit einem 2 Meter langen Schweißarm. Das System musste aufgrund der unterschiedlichen Durchmesser der zu schweißenden Rollen stufenlos in der Höhe verstellbar sein.
[...]
Landmaschinen - Geolokalisierungssystem in Verbindung mit einem digitalen Geschwindigkeitsregelsystem
Die Aufgabe bestand darin, ein Antriebssystem zu finden, das eine ausreichend schnelle Steuerung des Streugeräts auf landwirtschaftlichen Maschinen ermöglicht und sich leicht an das Geolokalisierungssystem anschließen lässt[...]

Servoantriebe für CNC-Laserschneidmaschine
Ein Hersteller von CNC-Fräsmaschinen war auf der Suche nach Hochgeschwindigkeits-Servoantrieben für eine neu konzipierte Laser-Fräsmaschine. Die Hauptanforderungen waren die Unterstützung von Linearmotoren und Encodern mit hoher Auflösung[...]

Siebte und achte Roboterachse
Die Aufgabe bestand darin, für die 7. und 8. Achse eines Robotersystems, das zur Bearbeitung schwerer Materialien eingesetzt wird, die richtige Antriebskonfiguration unter Berücksichtigung der Anforderungen des Kunden auszuwählen.
[...]
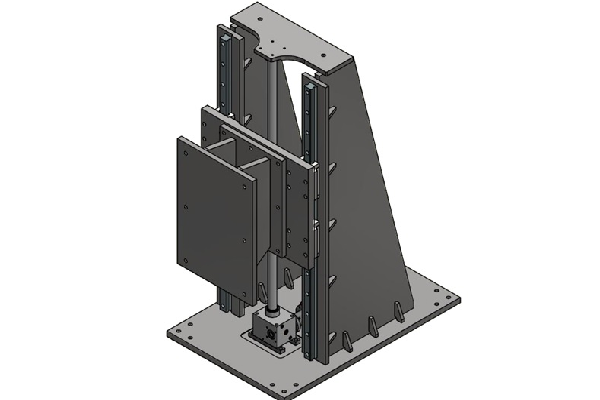
Optimierter Montageprozess
Ein Unternehmen der Automobilindustrie suchte ein schnelles und effizientes Ausführungssystem für die gleichzeitige Montage mehrerer Bauteile auf einer Grundplatte. Der Arbeitsplatz musste die geforderten Arbeitsparameter erfüllen, wie z.B. eine hohe Zykluszahl, Wiederholbarkeit, Beibehaltung der Qualität des gepressten [...]

Überschlagssimulator
Die Anwendung war ein Überschlagsimulator für die Fahrschule des berühmten Rallyefahrers Tomasz Kuchara. Eine ungewöhnliche Sache, aber unsere Firma hat keine Angst vor solchen ungewöhnlichen Aufgaben, im Gegenteil - sie bringen uns viel Freude!
[...]
Teleskopmast-Hubsystem
Ein Bootsbauunternehmen benötigte ein Hebesystem für einen ausfahrbaren Teleskopmast für ein elektrisch unabhängiges Boot. Gefordert waren witterungsbeständige Materialien und eine Gleichstromversorgung mit manuellem Notantrieb.
[...]
Antriebssysteme für AGVs
Die Aufgabe für unsere Techniker bestand darin, das optimale Antriebssystem in Bezug auf die Gesamtabmessungen und die angenommenen Transportgewichte auszuwählen, wobei die angenommenen Beschleunigungswerte einzuhalten waren.
[...]